Rosenblueth, A., Wiener, N., Bigelow, J.: Behavior, Purpose and Teleology. Philosophy of Science 10 (1943) 1, 18-24 (Nachdruck in W. Buckley, 1968, 221-225)
Volltext [ ]
In diesem sehr wichtigen Aufsatz geht es darum, dass ein Verhalten als Handlung auf ein Ziel ausgerichtet sein kann. In der Kybernetik hat Ziel eine andere Bedeutung. Eine thermostatengeregelte Heizung beispielsweise verhält sich so, dass eine bestimmte Ziel-Temperatur erreicht wird. Dabei handelt es sich um den Sollwert der Regelung, die Heizung hat natürlich kein Ziel.
Literatur:
R. Becker: Leitende Ziele kybernetischer Leitbilder
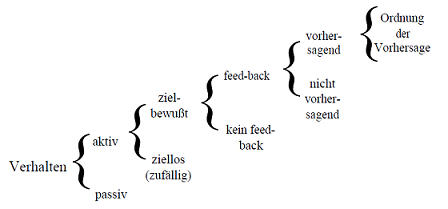
J. Bigelow, A. Rosenblueth un N. Wiener klassifizieren das Verhalten durch jeweils dichotome Kategorisierungen in hierarchischer Weise.
Aktiv vs passiv: Zunächst ist eine Entscheidung darüber zu treffen, ob die Energie für das Verhalten im wesentlichen aus dem Objekt selber kommt (daß es z.B. darin gespeichert ist), oder ob die Energie des Outputs direkt auf den Input zurückgeführt werden kann.
Zielbewußt vs ziellos (zufällig): In dieser Unterscheidung wird danach gefragt, ob das Verhalten in bezug auf ein zu erreichendes Ziel betrachtet wird oder nicht. Diese Dichotomie ist insofern kritisch, als diese Unterscheidung nur über eine Interpretation getroffen werden kann (s.u.).
Mit vs ohne Feed-back (teleologisch oder nicht-teleologisch): Üblicherweise unterscheidet man positives (ungedämpftes) und negatives (gedämpftes) Feed-back, wobei bei einer Betrachtung aktiven, zielbewußten Verhaltens eines Objekts nur negatives Feed-back infragekommt.
Vorhersagend vs nicht-vorhersagend: Mit dieser Dichotomie wird darauf abgehoben, ob das Verhalten in bezug auf das - etwa bewegte - Ziel Prognosen erstellt oder nicht. Man könnte diese Unterscheidung auch durch die Begriffe antizipativ vs nicht-antizipativ kennzeichnen.
Ordnung der Vorhersage: Damit ist gemeint, wieviele Koordinaten (Komponenten) bei der Vorhersage berücksichtigt werden müssen. Je mehr solche Komponenten - etwa bei instabilen Zielen - berücksichtigt werden müssen, desto schwieriger ist die Zielerreichung. Es muß bei dieser Klassifikation von Verhaltensweisen beachtet werden, daß die Zuordnung von Verhaltensweisen eines Objektes zu einer Kategorie jeweils von der willkürlichen Entscheidung eines Beobachters abhängt, also "theorie-" bzw. "bedeutungsimprägniert" ist. Damit ist gemeint, daß etwa bei der Beurteilung eines Verhaltens als absichtsvoll die willentliche Aktivität eines Subjekts unterstellt wird. Genau diese Dichotomie - obwohl vage und operational betrachtet eigentlich bedeutungslos - muß aber bei der Untersuchung von organismischen Modellen berücksichtigt werden, auch wenn bis heute - und vermutlich für immer - ein physiologisch-experimenteller Zugang zu diesem Problem scheitert (vgl. 1943, S. 19). (Quelle: W. Stangl)
Arturo Rosenblueth, Norbert Wiener und Julian Bigelow in: Philosophie der Wissenschaft, 10(1943), S. 18-24.
Dieser Aufsatz verfolgt zwei Ziele. Das erste besteht darin, das behavioristische Studium von Naturereignissen zu definieren und das Verhalten zu klassifizieren. Zweitens soll die Bedeutung des Begriffs "Zweck" hervorgehoben werden. Ausgehend von einem beliebigen Objekt, das für die Untersuchung von seiner Umgebung relativ abstrahiert wird, besteht der behavioristische Ansatz in der Untersuchung des Outputs des Objekts und der Beziehungen zwischen diesem Output und dem Input. Mit Output ist jede Veränderung gemeint, die das Objekt in seiner Umgebung hervorruft. Mit Input ist dagegen jedes Ereignis außerhalb des Objekts gemeint, das das Objekt in irgendeiner Weise verändert.
Die obige Erklärung dessen, was mit der behavioristischen Untersuchungsmethode gemeint ist, lässt die spezifische Struktur und die inhärente Organisation des Objekts aus. Diese Auslassung ist von grundlegender Bedeutung, da sie die Grundlage für die Unterscheidung zwischen der behavioristischen und der alternativen funktionalen Untersuchungsmethode ist. Bei der funktionalen Analyse geht es im Gegensatz zum behavioristischen Ansatz in erster Linie um die innere Organisation des untersuchten Objekts, seine Struktur und seine Eigenschaften; die Beziehungen zwischen dem Objekt und seiner Umgebung sind relativ nebensächlich.
Aus dieser Definition der behavioristischen Methode ergibt sich eine weit gefasste Definition von Verhalten. Unter Verhalten versteht man jede Veränderung einer Entität in Bezug auf ihre Umgebung. Diese Veränderung kann größtenteils ein Output des Objekts sein, wobei der Input dann minimal, entfernt oder irrelevant ist; oder aber die Veränderung kann unmittelbar auf einen bestimmten Input zurückgeführt werden.Dementsprechend kann jede Veränderung eines Objekts, die von außen erkennbar ist, als Verhalten bezeichnet werden. Der Begriff wäre also zu weit gefasst, wenn er nicht durch geeignete Adjektive eingeschränkt werden könnte, d. h. wenn das Verhalten klassifiziert werden könnte.
Die Betrachtung der mit dem Verhalten verbundenen Energieänderungen bietet eine Grundlage für die Klassifizierung. Aktives Verhalten ist ein Verhalten, bei dem das Objekt die Quelle der Ausgangsenergie ist, die an einer bestimmten spezifischen Reaktion beteiligt ist. Das Objekt kann Energie speichern, die von einem entfernten oder relativ unmittelbaren Input geliefert wird, aber der Input versorgt den Output nicht direkt mit Energie. Bei passivem Verhalten hingegen ist das Objekt keine Energiequelle; die gesamte Energie des Outputs kann auf den unmittelbaren Input zurückgeführt werden (z. B. das Werfen eines Objekts), oder das Objekt kann Energie kontrollieren, die während der gesamten Reaktion außerhalb des Objekts verbleibt (z. B. der Segelflug eines Vogels).
Aktives Verhalten kann in zwei Klassen unterteilt werden: absichtsloses (oder zufälliges) und zielgerichtetes Verhalten. Der Begriff "zielgerichtet" bedeutet, dass die Handlung oder das Verhalten als auf das Erreichen eines Ziels gerichtet interpretiert werden kann - d. h. auf einen Endzustand, in dem das sich verhaltende Objekt eine bestimmte zeitliche oder räumliche Korrelation mit einem anderen Objekt oder Ereignis erreicht. Zielloses Verhalten ist also ein Verhalten, das nicht als auf ein Ziel gerichtet interpretiert wird.
Die Unbestimmtheit des Wortes "kann", wie es oben verwendet wurde, könnte als so groß angesehen werden, dass die Unterscheidung nutzlos wäre. Dennoch ist die Anerkennung der Tatsache, dass ein Verhalten manchmal zielgerichtet sein kann, unvermeidlich und nützlich, wie folgt. - Die Grundlage des Konzepts der Absicht ist das Bewusstsein einer freiwilligen Handlung. Der Zweck freiwilliger Handlungen ist keine Frage der willkürlichen Interpretation, sondern eine physiologische Tatsache. Wenn wir eine freiwillige Handlung ausführen, wählen wir freiwillig einen bestimmten Zweck, nicht eine bestimmte Bewegung. Wenn wir also beschließen, ein Glas mit Wasser zu nehmen und es zum Mund zu führen, befehlen wir nicht bestimmten Muskeln, sich in einem bestimmten Ausmaß und in einer bestimmten Reihenfolge zusammenzuziehen; wir lösen lediglich den Zweck aus, und die Reaktion folgt automatisch. In der Tat war die experimentelle Physiologie bisher weitgehend unfähig, den Mechanismus der freiwilligen Aktivität zu erklären. Wir sind der Meinung, dass dieses Versagen auf die Tatsache zurückzuführen ist, dass ein Experimentator, wenn er die motorischen Regionen der Großhirnrinde stimuliert, keine freiwillige Reaktion nachahmt; er löst efferente, also leistungssteigernde Bahnen aus, aber er löst keinen Zweck aus, wie es freiwillig geschieht.
Oft wird die Ansicht vertreten, dass alle Maschinen zweckgerichtet sind. Diese Ansicht ist unhaltbar. Als erstes sind mechanische Geräte wie ein Roulette zu nennen, die genau für die Zwecklosigkeit konzipiert sind. Dann können Geräte wie eine Uhr betrachtet werden, die zwar mit einem Zweck konstruiert wurde, aber deren Funktion zwar geordnet, aber nicht zweckmäßig ist, d.h. es gibt keinen bestimmten Endzustand, auf den die Bewegung der Uhr hinstrebt. In ähnlicher Weise kann ein Gewehr zwar für einen bestimmten Zweck verwendet werden, aber das Erreichen eines Ziels ist kein wesentlicher Bestandteil der Leistung des Gewehrs; es kann absichtlich zwecklos geschossen werden.
Manche Maschinen hingegen sind von Natur aus zielgerichtet. Ein Torpedo mit einem Zielsuchmechanismus ist ein Beispiel dafür. Der Begriff "Servomechanismen" wurde geprägt, um Maschinen zu bezeichnen, denen ein zielgerichtetes Verhalten innewohnt. Aus diesen Überlegungen geht hervor, dass der Begriff des zweckgerichteten Verhaltens zwar relativ vage und daher operationell weitgehend bedeutungslos ist, dass das Konzept des Zwecks jedoch nützlich ist und daher beibehalten werden sollte.
|
Zielgerichtetes aktives Verhalten kann in zwei Klassen unterteilt werden: rückgekoppeltes (oder teleologisches) und nicht-rückgekoppeltes (oder nicht-teleologisches) Verhalten. Der Ausdruck rückgekoppeltes Verhalten wird von Ingenieuren in zwei verschiedenen Bedeutungen verwendet. Im weitesten Sinne kann er bedeuten, dass ein Teil der Ausgangsenergie eines Geräts oder einer Maschine als Eingang zurückgeführt wird; ein Beispiel ist ein elektrischer Verstärker mit Rückkopplung. |
|
Die Rückkopplung ist in diesen Fällen positiv - der Anteil des Ausgangs, der wieder in das Objekt eintritt, hat das gleiche Vorzeichen wie das ursprüngliche Eingangssignal. Die positive Rückkopplung ergänzt die Eingangssignale, sie korrigiert sie nicht. Der Begriff Rückkopplung wird auch in einem engeren Sinne verwendet, um zu bezeichnen, dass das Verhalten eines Objekts durch die Fehlerspanne gesteuert wird, in der sich das Objekt zu einem bestimmten Zeitpunkt in Bezug auf ein relativ spezifisches Ziel befindet. Die Rückkopplung ist dann negativ, d. h. die Signale des Ziels werden verwendet, um Ausgaben zu begrenzen, die sonst über das Ziel hinausgehen würden. Es ist diese zweite Bedeutung des Begriffs Rückkopplung, die hier verwendet wird.
Man kann davon ausgehen, dass jedes zielgerichtete Verhalten eine negative Rückkopplung erfordert. Wenn ein Ziel erreicht werden soll, sind zu irgendeinem Zeitpunkt Signale vom Ziel notwendig, um das Verhalten zu steuern. Unter Verhalten ohne Rückkopplung versteht man ein Verhalten, bei dem es keine Signale vom Ziel gibt, die die Aktivität des Objekts im Verlauf des Verhaltens verändern. So kann eine Maschine so eingestellt werden, dass sie auf ein leuchtendes Objekt auftrifft, obwohl sie für Licht unempfindlich ist. In ähnlicher Weise kann eine Schlange einen Frosch oder ein Frosch eine Fliege angreifen, ohne dass die Beute nach Beginn der Bewegung eine visuelle oder sonstige Meldung abgibt. Die Bewegung ist in diesen Fällen so schnell, dass es unwahrscheinlich ist, dass Nervenimpulse Zeit haben, auf der Netzhaut zu entstehen, zum zentralen Nervensystem zu wandern und weitere Impulse auszulösen, die die Muskeln rechtzeitig erreichen würden, um die Bewegung wirksam zu verändern.
Im Gegensatz zu den betrachteten Beispielen beinhalten das Verhalten einiger Maschinen und einige Reaktionen von Lebewesen eine kontinuierliche Rückkopplung vom Ziel, die das sich verhaltende Objekt verändert und leitet. Diese Art von Verhalten ist effektiver als das oben erwähnte, insbesondere wenn das Ziel nicht stationär ist.
Eine kontinuierliche Rückkopplungssteuerung kann jedoch zu einem sehr ungeschickten Verhalten führen, wenn die Rückkopplung nicht ausreichend gedämpft ist und daher bei bestimmten Schwingungsfrequenzen positiv statt negativ wird. Nehmen wir zum Beispiel an, dass eine Maschine so konstruiert ist, dass sie auf ein sich bewegendes leuchtendes Ziel auftrifft; der Weg, dem die Maschine folgt, wird durch die Richtung und Intensität des Lichts vom Ziel gesteuert. Nehmen wir weiter an, dass die Maschine stark überschwingt, wenn sie einer Bewegung des Ziels in eine bestimmte Richtung folgt; dann wird ein noch stärkerer Reiz abgegeben, der die Maschine in die entgegengesetzte Richtung dreht.
Wenn diese Bewegung erneut über das Ziel hinausschießt, kommt es zu einer Reihe von immer größeren Schwingungen, und die Maschine verfehlt das Ziel.
Dieses Bild der Folgen einer ungedämpften Rückkopplung ähnelt auffallend dem, das man bei der Ausführung einer freiwilligen Handlung durch einen Kleinhirnpatienten sieht. Im Ruhezustand zeigt der Patient keine offensichtliche motorische Störung. Wenn er jedoch aufgefordert wird, ein Glas Wasser von einem Tisch zum Mund zu tragen, führt die Hand, die das Glas trägt, eine Reihe von oszillatorischen Bewegungen mit zunehmender Amplitude aus, während sich das Glas dem Mund nähert, so dass das Wasser verschüttet und der Zweck nicht erfüllt wird. Dieser Test ist typisch für die gestörten motorischen Leistungen von Patienten mit Kleinhirnkrankheiten. Die Analogie zum Verhalten einer Maschine mit ungedämpfter Rückkopplung ist so anschaulich, dass wir die Vermutung wagen, dass die Hauptfunktion des Kleinhirns in der Kontrolle der nervösen Rückkopplungsmechanismen besteht, die an der zielgerichteten motorischen Aktivität beteiligt sind.
Zielgerichtetes Verhalten mit Rückkopplung kann wiederum unterteilt werden. Es kann extrapolativ (prädiktiv) oder nicht-extrapolativ (nicht-prädiktiv) sein. Die Reaktionen einzelliger Organismen, die als Tropismen bekannt sind, sind Beispiele für nicht-prädiktive Leistungen. Die Amöbe folgt lediglich der Quelle, auf die sie reagiert; es gibt keinen Hinweis darauf, dass sie den Weg einer sich bewegenden Quelle extrapoliert. Vorausschauendes Verhalten von Tieren hingegen ist eine Selbstverständlichkeit. Eine Katze, die eine laufende Maus verfolgt, läuft nicht direkt auf die Region zu, in der sich die Maus zu einem bestimmten Zeitpunkt befindet, sondern bewegt sich auf eine extrapolierte zukünftige Position zu. Beispiele für prädiktive und nicht prädiktive Servomechanismen lassen sich ebenfalls leicht finden.
Prädiktives Verhalten kann in verschiedene Ordnungen eingeteilt werden. Die Katze, die die Maus jagt, ist ein Beispiel für Vorhersage erster Ordnung; die Katze sagt lediglich den Weg der Maus voraus. Das Werfen eines Steins auf ein bewegliches Ziel erfordert eine Vorhersage zweiter Ordnung; die Wege des Ziels und des Steins sollten vorhergesehen werden. Beispiele für Vorhersagen höherer Ordnung sind das Schießen mit einer Schleuder oder mit Pfeil und Bogen.
Vorausschauendes Verhalten erfordert die Unterscheidung von mindestens zwei Koordinaten, einer zeitlichen und mindestens einer räumlichen Achse. Die Vorhersage ist jedoch effektiver und flexibler, wenn das sich verhaltende Objekt auf Veränderungen in mehr als einer Raumkoordinate reagieren kann. Die Sinnesrezeptoren eines Organismus oder die entsprechenden Elemente einer Maschine können daher das Vorhersageverhalten einschränken. So folgt ein Bluthund einer Fährte, d. h. er zeigt beim Verfolgen der Fährte kein prädiktives Verhalten, weil ein chemischer, olfaktorischer Input nur räumliche Informationen liefert: die Entfernung, die durch die Intensität angezeigt wird.
Die äußeren Veränderungen, die sich auf die Hör- oder besser noch auf die Sehrezeptoren auswirken können, ermöglichen eine genauere räumliche Lokalisierung und damit die Möglichkeit effektiverer prädiktiver Reaktionen, wenn der Input diese Rezeptoren betrifft. Zusätzlich zu den Einschränkungen, die die Rezeptoren der Fähigkeit zur Durchführung extrapolativer Aktionen auferlegen, können auch Einschränkungen auftreten, die auf die interne Organisation des sich verhaltenden Objekts zurückzuführen sind. So sollte eine Maschine, die ein sich bewegendes leuchtendes Objekt vorausschauend verfolgen soll, nicht nur lichtempfindlich sein (z. B. durch den Besitz einer fotoelektrischen Zelle), sondern auch über eine geeignete Struktur zur Interpretation des Lichteingangs verfügen. Es ist wahrscheinlich, dass Einschränkungen der internen Organisation, insbesondere der Organisation des Zentralnervensystems, die Komplexität des prädiktiven Verhaltens bestimmen, das ein Säugetier erreichen kann.
So ist es wahrscheinlich, dass das Nervensystem einer Ratte oder eines Hundes so beschaffen ist, dass es die Integration von Input und Output, die für die Durchführung einer prädiktiven Reaktion dritter oder vierter Ordnung erforderlich ist, nicht zulässt. In der Tat ist es möglich, dass eines der Merkmale der Diskontinuität des Verhaltens, die beim Vergleich des Menschen mit anderen hohen Säugetieren zu beobachten ist, darin liegt, dass die anderen Säugetiere auf ein Vorhersageverhalten niedriger Ordnung beschränkt sind, während der Mensch potenziell zu recht hohen Vorhersageordnungen fähig ist.
Die bisher vorgeschlagene Klassifizierung des Verhaltens wird hier tabellarisch dargestellt:
Es ist offensichtlich, dass jede der aufgestellten Dichotomien willkürlich ein als interessant erachtetes Merkmal herausgreift und einen amorphen Rest übrig lässt: die Nicht-Klasse. Es ist auch offensichtlich, dass die Kriterien für die verschiedenen Dichotomien heterogen sind. Es liegt daher auf der Hand, dass viele andere Klassifizierungslinien zur Verfügung stehen, die von der oben entwickelten unabhängig sind. So könnte das Verhalten im Allgemeinen oder jede der in der Tabelle aufgeführten Gruppen in linear (d. h. Output proportional zum Input) und nichtlinear unterteilt werden. Eine Unterteilung in kontinuierlich und diskontinuierlich könnte für viele Zwecke nützlich sein. Die verschiedenen Freiheitsgrade, die das Verhalten aufweisen kann, könnten ebenfalls als Grundlage für die Systematisierung verwendet werden.
Die oben dargestellte Klassifizierung wurde aus mehreren Gründen gewählt. Sie führt dazu, dass die Klasse des prädiktiven Verhaltens herausgegriffen wird, eine Klasse, die besonders interessant ist, da sie die Möglichkeit bietet, immer komplexere Tests des Verhaltens von Organismen zu systematisieren. Sie unterstreicht die Konzepte des Zwecks und der Teleologie, Konzepte, die zwar gegenwärtig eher diskreditiert sind, sich aber als wichtig erweisen. Schließlich wird deutlich, dass eine einheitliche behavioristische Analyse sowohl auf Maschinen als auch auf lebende Organismen anwendbar ist, unabhängig von der Komplexität des Verhaltens.
Gelegentlich wird behauptet, dass die Konstrukteure von Maschinen lediglich versuchen, die Leistungen lebender Organismen zu duplizieren. Diese Aussage ist unkritisch. Dass das grobe Verhalten einiger Maschinen den Reaktionen von Organismen ähnelt, ist nicht überraschend. Das Verhalten von Tieren umfasst viele Varianten aller möglichen Verhaltensweisen, und die bisher entwickelten Maschinen haben bei weitem nicht alle dieser möglichen Verhaltensweisen ausgeschöpft. Es gibt also eine beträchtliche Überschneidung zwischen den beiden Verhaltensbereichen. Es lassen sich jedoch leicht Beispiele für von Menschen geschaffene Maschinen finden, deren Verhalten über das menschliche Verhalten hinausgeht. Eine Maschine mit elektrischem Ausgang ist ein Beispiel dafür, denn im Gegensatz zu den elektrischen Fischen ist der Mensch nicht in der Lage, Elektrizität auszusenden. Die Funkübertragung ist vielleicht ein noch besseres Beispiel, denn es ist kein Tier bekannt, das in der Lage ist, Kurzwellen zu erzeugen, selbst wenn man die so genannten Telepathieversuche ernst nimmt.
Ein weiterer Vergleich zwischen lebenden Organismen und Maschinen führt zu den folgenden Schlussfolgerungen. Die Untersuchungsmethoden für die beiden Gruppen sind derzeit ähnlich. Ob sie immer gleich sein sollten, kann davon abhängen, ob es ein oder mehrere qualitativ unterschiedliche, einzigartige Merkmale gibt, die bei der einen Gruppe vorhanden sind und bei der anderen fehlen. Solche qualitativen Unterschiede haben sich bisher nicht gezeigt.
Die allgemeinen Verhaltensklassen sind bei Maschinen und lebenden Organismen gleich. Spezifische, enge Klassen können ausschließlich in der einen oder der anderen Gruppe zu finden sein. So gibt es noch keine Maschine, die ein Sanscrit-Mandarin-Wörterbuch schreiben kann. So ist auch kein lebender Organismus bekannt, der auf Rädern rollt - man stelle sich vor, was herausgekommen wäre, wenn die Ingenieure darauf bestanden hätten, lebende Organismen zu kopieren, und deshalb Beine und Füße statt Räder in ihre Lokomotiven eingebaut hätten.
Während die behavioristische Analyse von Maschinen und lebenden Organismen weitgehend einheitlich ist, zeigt ihre funktionelle Untersuchung tiefgreifende Unterschiede. Strukturell gesehen sind Organismen hauptsächlich kolloidal und enthalten vor allem große, komplexe und anisotrope Eiweißmoleküle; Maschinen sind hauptsächlich metallisch und enthalten hauptsächlich einfache Moleküle. Aus energetischer Sicht weisen Maschinen in der Regel relativ große Potentialunterschiede auf, die eine schnelle Mobilisierung von Energie ermöglichen; in Organismen ist die Energie gleichmäßiger verteilt und nicht sehr mobil. So ist die Leitung in elektrischen Maschinen hauptsächlich elektronisch, während in Organismen die elektrischen Veränderungen meist ionisch sind. Umfang und Flexibilität werden in Maschinen vor allem durch die zeitliche Vervielfachung von Effekten erreicht; Frequenzen von einer Million pro Sekunde oder mehr können leicht erreicht und genutzt werden. In Organismen ist eher die räumliche als die zeitliche Vervielfältigung die Regel; die zeitlichen Leistungen sind dürftig - die schnellsten Nervenfasern können nur etwa tausend Impulse pro Sekunde leiten; die räumliche Vervielfältigung ist dagegen reichlich vorhanden und in ihrer Kompaktheit bewundernswert. Dieser Unterschied wird durch den Vergleich eines Fernsehempfängers und des Auges gut veranschaulicht. Der Fernsehempfänger kann als Einzelzapfen-Netzhaut beschrieben werden; die Bilder entstehen durch Abtastung, d.h. durch geordnete aufeinanderfolgende Erfassung des Signals mit einer Rate von etwa 20 Millionen pro Sekunde. Die Abtastung ist ein Prozess, der in Organismen selten oder nie vorkommt, da er schnelle Frequenzen für eine effektive Leistung erfordert. Das Auge arbeitet mit einem räumlichen und nicht mit einem zeitlichen Multiplikator. Anstelle des einen Zapfens des Fernsehempfängers hat das menschliche Auge etwa 6,5 Millionen Zapfen und etwa 115 Millionen Stäbchen.
Wenn ein Ingenieur einen Roboter entwerfen würde, der sich ähnlich wie ein tierischer Organismus verhält, würde er vorerst nicht versuchen, ihn aus Proteinen und anderen Kolloiden herzustellen. Er würde ihn wahrscheinlich aus Metallteilen, einigen Dielektrika und vielen Vakuumröhren bauen. Die Bewegungen des Roboters könnten ohne weiteres viel schneller und kraftvoller sein als die des ursprünglichen Organismus. Lernen und Gedächtnis wären jedoch nur rudimentär vorhanden. In den kommenden Jahren, wenn das Wissen über Kolloide und Proteine zunimmt, könnten Ingenieure versuchen, Roboter zu entwerfen, die nicht nur ein Verhalten, sondern auch eine Struktur haben, die der eines Säugetiers ähnelt. Das ultimative Modell einer Katze ist natürlich eine andere Katze, ob sie nun von einer anderen Katze geboren oder in einem Labor synthetisiert wurde.
Wenn ein Ingenieur einen Roboter entwerfen würde, der sich ähnlich wie ein tierischer Organismus verhält, würde er vorerst nicht versuchen, ihn aus Proteinen und anderen Kolloiden herzustellen. Er würde ihn wahrscheinlich aus Metallteilen, einigen Dielektrika und vielen Vakuumröhren bauen. Die Bewegungen des Roboters könnten ohne weiteres viel schneller und kraftvoller sein als die des ursprünglichen Organismus. Lernen und Gedächtnis wären jedoch nur rudimentär vorhanden. In den kommenden Jahren, wenn das Wissen über Kolloide und Proteine zunimmt, werden Ingenieure vielleicht versuchen, Roboter zu entwickeln, die nicht nur ein Verhalten, sondern auch eine Struktur haben, die der eines Säugetiers ähnelt. Das ultimative Modell einer Katze ist natürlich eine andere Katze, ob sie nun von einer anderen Katze geboren oder in einem Labor synthetisiert wurde.
Bei der Klassifizierung von Verhalten wurde der Begriff Teleologie als Synonym für einen durch Rückkopplung gesteuerten Zweck verwendet. Teleologie wurde in der Vergangenheit so interpretiert, dass sie einen Zweck impliziert, und das vage Konzept einer letzten Ursache wurde oft hinzugefügt. Dieses Konzept der letzten Ursache hat dazu geführt, dass die Teleologie dem Determinismus gegenübergestellt wird. Eine Diskussion über Kausalität, Determinismus und Endursachen würde den Rahmen dieses Aufsatzes sprengen. Es sei jedoch darauf hingewiesen, dass die Zweckmäßigkeit, wie sie hier definiert wird, völlig unabhängig von der Kausalität ist, sei sie nun ursprünglich oder endgültig. Die Teleologie ist vor allem deshalb in Verruf geraten, weil sie so definiert wurde, dass sie eine Ursache impliziert, die zeitlich nach einer bestimmten Wirkung liegt. Als dieser Aspekt der Teleologie verworfen wurde, wurde leider auch die damit verbundene Anerkennung der Bedeutung des Zwecks verworfen. Da wir Zweckmäßigkeit für ein Konzept halten, das für das Verständnis bestimmter Verhaltensweisen notwendig ist, schlagen wir vor, dass eine teleologische Studie nützlich ist, wenn sie Probleme der Kausalität vermeidet und sich lediglich mit einer Untersuchung der Zweckmäßigkeit befasst.
Wir haben die Konnotation von teleologischem Verhalten eingeschränkt, indem wir diese Bezeichnung nur auf zielgerichtete Reaktionen anwenden, die durch den Fehler der Reaktion gesteuert werden - d. h. durch die Differenz zwischen dem Zustand des sich verhaltenden Objekts zu einem beliebigen Zeitpunkt und dem als Ziel interpretierten Endzustand. Teleologisches Verhalten wird so zum Synonym für Verhalten, das durch negative Rückkopplung gesteuert wird, und gewinnt somit durch eine hinreichend eingeschränkte Konnotation an Präzision.
Nach dieser eingeschränkten Definition steht die Teleologie nicht im Gegensatz zum Determinismus, sondern zur Nicht-Teleologie. Sowohl teleologische als auch nicht-teleologische Systeme sind deterministisch, wenn das betrachtete Verhalten in den Bereich fällt, in dem der Determinismus gilt. Das Konzept der Teleologie hat mit dem Konzept der Kausalität nur eines gemeinsam: eine Zeitachse. Kausalität impliziert jedoch eine einseitige, relativ irreversible funktionale Beziehung, während sich die Teleologie mit dem Verhalten und nicht mit funktionalen Beziehungen befasst.
Ganz am Anfang steht NICHT, wovon die Rede ist: von Menschen oder von Maschinen !! Die kritisierten Behavioristen haben aber nie über Maschinen gesprochen !!
Wiener hate eine komische Auffassung von Behaviorismus: Er betrachtet die Umwelt des Systems (klar, das ist gängig, aber in seinem Fall blöd)
Wiener verwendet Energie(änderungen) um das Verhalten zu klassifizieren
Das bekannte Schema, hier aktiv/passiv genannt: Der Hund hat eigene "Energie", der Ball nicht
mit der interssanten Unterscheidung: Segelflugzeug=Vogel (obwohl fliegen gemeint ist)
Der Ausdruck "zielgerichtet" ist eigenartig definiert
Wenn wir eine freiwillige Handlung ausführen, wählen wir freiwillig einen bestimmten Zweck, nicht eine bestimmte Bewegung
Die Zweck-Definition ist schwachsinnig! Oft wird die Ansicht vertreten, dass alle Maschinen zweckgerichtet sind. Diese Ansicht ist unhaltbar. Als erstes sind mechanische Geräte wie ein Roulette zu nennen, die genau für die Zwecklosigkeit konzipiert sind. Dann können Geräte wie eine Uhr betrachtet werden, die zwar mit einem Zweck konstruiert wurde, aber deren Funktion zwar geordnet, aber nicht zweckmäßig ist, d.h. es gibt keinen bestimmten Endzustand, auf den die Bewegung der Uhr hinstrebt.
Auch hier wird der Zweck verfehlt, der darin besteht eine Kugel zu beschleunigen!! In ähnlicher Weise kann ein Gewehr zwar für einen bestimmten Zweck verwendet werden, aber das Erreichen eines Ziels ist kein wesentlicher Bestandteil der Leistung des Gewehrs; es kann absichtlich zwecklos geschossen werden.
Nächste Punkt:
Der Begriff "Servomechanismen" wurde geprägt, um Maschinen zu bezeichnen, denen ein zielgerichtetes Verhalten innewohnt
Servo bedeutet Verstärkung, ich weiss allerdings nicht, wo das Wort herkommt und worauf sich Wiener bezieht
Teleologie führt er als Synonym für "rückgekoppelt ein: "..nicht-rückgekoppeltes (oder nicht-teleologisches) Verhalten."
re-entry: The feed-back is in these cases positive — the fraction of the output which reenters the object has the same sign as the original input signal.
Die negative Rückkoppelung - um die es hier geht - stellt sich Wiener damals noch relativ langsam vor
Prädikatives (vorausschauendes?/extrapolativ) Verhalten 1. und 2. Ordnung (die Katze verfolgt die Maus versus auf etwas schiessen, was sich bewegt)
Das passt zum Standardargument: Fliegerabwehrkanonen - das aber selten bis nie reflektiert wird
Norbert Wiener über Teleologie – Lexikon der Argumente
Wright I 157
Teleologie/Wiener/Bigelow/Wright, G. H.: Bigelow und Wiener wollen „teleologisches Verhalten“ auf „zielgerichtete Reaktionen, die durch trial and error kontrolliert sind“ beschränken. Damit wird es gleichbedeutend mit Verhalten, das durch negatives Feedback kontrolliert wird. (A. Rosenblueth, N. Wiener and J. Bigelow „Behavior, Purpose and Teleology“, 1943, S. 23-24.). (Siehe auch Feedback/Wright, G. H.).
Wright I 28
Teleologie/Gleichgewicht/Homöostase/Feedback/Kybernetik/ Wright, G. H.: Bsp Regelung der Temperatur eines Systems durch einen Thermostaten. Hier wird das Steigen oder Fallen der Temperatur als „Defekt“ bzw. „Korrektur“ eines Teilsystems betrachtet. Der Wirkungs-Faktor des zweiten Systems verleiht der Wirkungsweise des Ursache-Faktors des ersten Systems einen „Anschein von Teleologie“. Beide Systeme funktionieren jedoch nach Kausalgesetzen.
Rosenblueth/Wiener/Bigelow: These: Zielgerichtetheit lässt sich generell mit Hilfe einer solchen Verkettung von Kausalsystemen erklären.
Georg Henrik von Wright über Feedback – Lexikon der Argumente
I 28
Feedback/Teleologie/Wright, G. H.: Ein Schlüsselbegriff in der „kausalistischen“ Theorie der Zielgerichtetheit ist der Begriff des negativen Feedback. (Vgl. R. Taylor Comments 1950a(1), R. Taylor, 1950b(2), - A.Rosenblueth and N. Wiener, Purposeful and Non-Purposeful Behavior(3) - A. Rosenblueth, N. Wiener and J. Bigelow 1968(4)).
I 156
TaylorVsRosenblueth/TaylorVsWiener/TaylorVsBigelow/Wright: Taylor nennt die Auffassungen von Rosenblueth, Wiener und Bigelow eine „mechanistische“ Konzeption von Zielgerichtetheit.
>Ziele, >Handeln, >Zwecke, >Zweckrationalität, >Zwecktätigkeit.
Wright: Der Ausdruck „mechanistisch“ muss jedoch in einem weiteren Sinn verwendet werden, der. Glaube ich, besser von dem Ausdruck „kausalistisch“ erfasst wird.
>Kausalität, >Kausalrelation.
Die Autoren selbst nennen ihre Auffassung nicht kausal. Sie sind im Gegenteil
I 157
darauf bedacht, zwischen Kausalität und ihrem Begriff von Teleologie zu unterscheiden.
>Teleologie.
WrightVsBigelow/WrightVsWiener: Das scheint mit eine zu starke Beschränkung des Ausdrucks „kausal“ zu sein.
Teleologie/Wiener/Bigelow/Wright, G. H.: Bigelow und Wiener wollen „teleologisches Verhalten“ auf „zielgerichtete Reaktionen, die durch trial and error kontrolliert sind“ beschränken. Damit wird es gleichbedeutend mit Verhalten, das durch negatives Feedback kontrolliert wird. (A. Rosenblueth, N. Wiener and J. Bigelow „Behavior, Purpose and Teleology“, 1943(5)).
>John Bigelow.
1. R. Taylor Comments on a Mechanistic Conception of Purpusefoulness, 1950a
2. R. Taylor, Purposeful and Non-Purposeful Behavior: A Rejoinder, 1950b
3. A. Rosenblueth, N. Wiener and J. Bigelow „Behavior, Purpose and Teleology“; 1968.
4. A.Rosenblueth and N. Wiener, Purposeful and Non-Purposeful Behavior
5. A. Rosenblueth, N. Wiener and J. Bigelow „Behavior, Purpose and Teleology“, 1943, S. 23-24.
Dieser Unterschied wird durch den Vergleich eines Fernsehempfängers und des Auges gut veranschaulicht. Der Fernsehempfänger kann als Einzelzapfen-Netzhaut beschrieben werden; die Bilder entstehen durch Abtastung, d.h. durch geordnete aufeinanderfolgende Erfassung des Signals mit einer Rate von etwa 20 Millionen pro Sekunde. Die Abtastung ist ein Prozess, der in Organismen selten oder nie vorkommt, da er schnelle Frequenzen für eine effektive Leistung erfordert. Das Auge arbeitet mit einem räumlichen und nicht mit einem zeitlichen Multiplikator. Anstelle des einen Zapfens des Fernsehempfängers hat das menschliche Auge etwa 6,5 Millionen Zapfen und etwa 115 Millionen Stäbchen